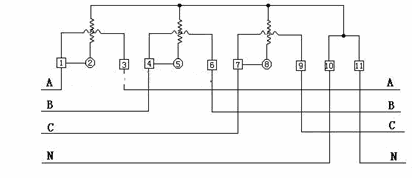
Schematic diagram of a small, low-cost and relatively constant current capacitor buck LED driver.
The working principle of the LED driver is to limit the maximum operating current by using the capacitive reactance generated by the capacitor at a certain AC signal frequency. Therefore, the working principle of the capacitor step-down is not complicated.
At 50Hz, the capacitance generated by a 1uF capacitor is about 3180 Ω.
When the AC voltage of 220V is added to both ends of the capacitor, the maximum current flowing through the capacitor is approximately 70mA.Although the current flowing through the capacitor is 70mA, but does not produce power consumption on the capacitor, if the capacitor is an ideal capacitor, then the current flowing through the capacitor is a virtual current, and its work is reactive power.
The use of capacitive buck schematic diagram is a common small current power supply diagram , with small volume,low cost and current is relatively constant and other advantages, and is also commonly used in the driving diagram of the LED.
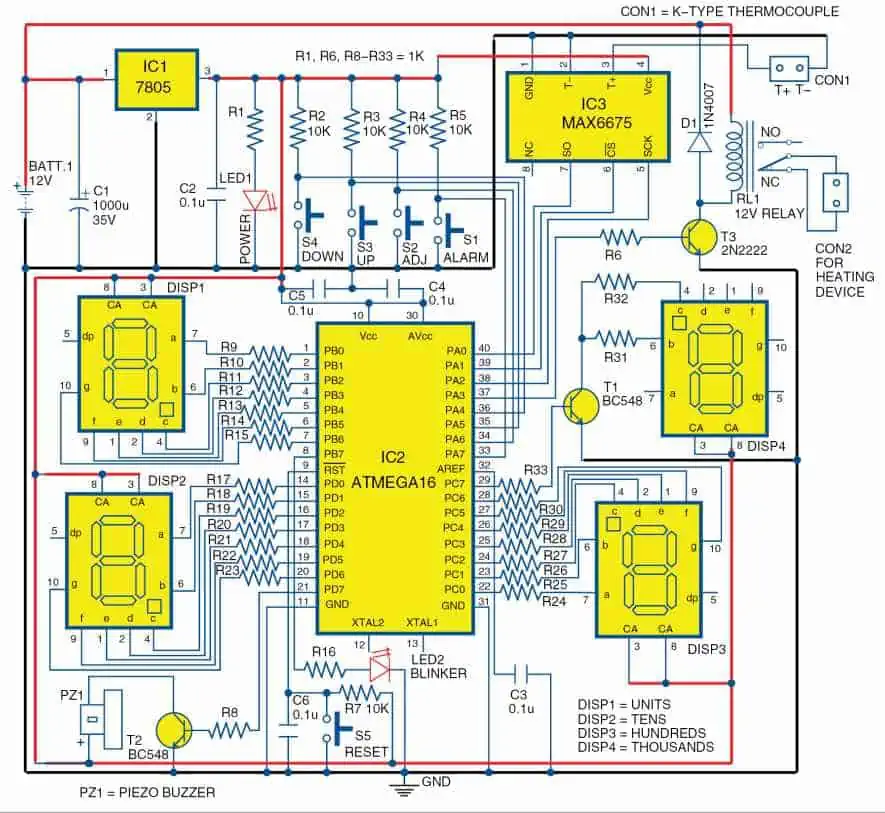
The following figure shows an actual LED driver diagram with capacitor step-down: Most of the application diagram do not have a varistor or transient voltage suppression transistor. It is recommended that the connection, due to varistor or transient voltage suppression transistor can effectively discharge the mutation current in the moment of voltage mutation (such as led lightning, large power equipment start, etc.), effectively bleed the abrupt current to protect the diode and other transistors, and their response time is generally in the order of micro milliseconds.
The pressure resistance of the filter capacitor C2,C3 depends on the load voltage, which is generally 1.2 times times the load voltage, and its capacitance capacity depends on the size of the load current.

Introduction
Buck converters are DC-DC step down regulators that can provide an efficient and flexible means of driving LED lighting. By converting a higher DC input voltage to a lower adjustable output voltage, buck converters allow controlling the current through and brightness of LEDs.
However, LED loads present some specific design considerations for buck converter circuits regarding dimming methods, startup currents, and topology selections. With careful component selection and circuit configuration, buck regulators can form the basis of robust LED drivers that are compact, efficient, and inexpensive.
Buck Converter Basics

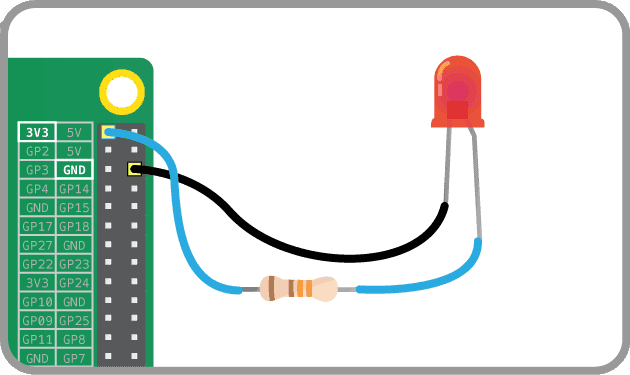
Here is a basic non-isolated buck converter circuit:
The key operating principles:
- An inductor and capacitor connected in series smooths the switched input into a lower DC output voltage
- Output voltage is a function of duty cycle D = Vout / Vin
- Fast switching with pulse width modulation (PWM) maintains voltage regulation
- Diode prevents reverse inductor current flow when switch opened
- Inductor limits inrush current when switch closes
Buck regulators provide efficient DC-DC conversion at high switching frequencies with minimal components. Output can be adjusted or dimmed by varying the duty cycle.
Using Bucks for LED Drivers
The buck converter’s flexible and efficient output makes it well suited as an LED driver with some design considerations:
Lower Voltage Requirements
- LEDs typically operate at 1.5V to 3.5V, much lower than most buck input sources. Large step-down ratio required.
- May need wider duty cycle range or two-stage conversion for large input-output differentials.
Constant Current Control
- LEDs require current limiting for stable operation. Bucks require output current control rather than just voltage.
- Current sense resistor with feedback allows adjusting PWM to maintain constant current through LEDs.
Dimming Ability
- Varying LED brightness requires dimming capability. PWM dimming integrates well with buck converter PWM control.
- Lower duty cycle reduces average current providing dimming control.
Startup Behaviors
- Inrush current control needed for LEDs. Cycle-by-cycle and soft-start techniques used.
- Preload may be required to avoid output voltage overshoot on startup.
With good engineering, bucks make excellent LED drivers. But the unique electrical characteristics require special consideration.
LED Driver Topology Comparison
Several buck-based topologies can be used for LED lighting drivers:
| Topology | Description |
|---|---|
| Basic Buck | Simplest option. Requires current sense resistor which wastes power. |
| Buck with Current Sensing | Replaces sense resistor with low-side current sensing for greater efficiency. |
| Hysteretic Buck | Uses constant on-time with hysteretic current control. Fast transient response but some ripple. |
| \Buck-Boost | Allows continued operation as input voltage approaches LED voltage. Prevents dropout. |
| \SEPIC | Single inductor converter provides input-output isolation and prevents dropout. |
| Cuk | Provides input-output isolation. High efficiency but higher part count. |
Selecting the optimal buck implementation depends on factors like required dimming method, isolation needs, and available input voltage range.
LED Driver Design Considerations
Here are some key design factors when developing a buck LED driver:
Integrated vs Discreet Implementation
- Integrated circuits simplify design with complete regulator solutions. Fewer external components needed.
- Discreet designs allow greater customization of performance and form factor. More complex circuit analysis required.
Input Voltage Range
- Determine minimum to maximum input voltage. Allows proper selection of power switch rating and duty cycle range.
- Account for dimming impacts on input current when sizing inductors, caps, and switches.
Output Voltage and Current
- Output requirements dictate power stage design. Higher currents necessitate lower loss components.
- Ensure adequate headroom between LED voltage and input for regulation.
Efficiency Targets
- LEDs benefit from high efficiency to minimize heating and power waste.
- Discreet design allows optimization but integrated ICs often offer 80%+ efficiency.
Size/Footprint Limits
- Component selection and topology affect overall driver size.
- Consider needs of target application when minimizing footprint.
Thermal Management
- LED drivers generate heat that must be dissipated to maximize lifetime.
- Use oversized components, thermal vias/planes, and forced air cooling as needed.
Careful balancing of size, cost, complexity, and performance goals leads to an optimized LED driver design.
Dimming Methods
Controlling LED brightness is key. Buck converters provide dimming flexibility:
Analog PWM Dimming
- Vary duty cycle of buck controller to adjust average LED current directly.
- 0-100% dimming range possible. Can cause color shifts at low currents in some LEDs.
Digital PWM
- Use a digital PWM signal to control analog PWM dimming circuit. Allows digital control.
DC Voltage Dimming
- Adjust reference voltage to regulator to set output current level. Allows simple interface.
Analog Dimming
- Control output current amplitude directly rather than adjusting duty cycle.
- Requires more complex circuitry to implement.
The preferred method depends on external controls, required dimming resolution, and component complexity constraints.
Component Selection Guidelines
Proper component selection helps optimize LED driver buck converters:
Inductors
- Low core and copper losses at operating frequencies and currents
- Tight tolerance to ensure consistent current control
- Sufficient saturation current rating for inrush tolerance
- Quality ceramics for main filter caps to reduce ESR
- Meet ripple current ratings at full load
- Provide sufficient capacitance for line and load regulation
Power Switches
- MOSFETs or IGBTs selected based on Vin, Iout, and frequency
- Logic-level FETs avoid need for driver ICs
- Match Rds(on) to efficiency targets
Current Sense
- Precision sense resistors or current sense amplifier ICs
- Provide sufficient bandwidth for current loop stability
Control ICs
- Integrated controllers offer protection features and design ease
- Discreet controllers allow greater customization
Component selection balancing cost, size constraints, and performance goals is necessary to produce an optimized LED driving solution.
Design Process Steps
The overall buck LED driver design process involves:
- Define target application and requirements
- Select topology based on needs like dimming, isolation, etc.
- Model power stage and simulate in software for feasibility
- Choose controller approach – discreet, integrated IC
- Select components meeting operating parameters and design goals
- Develop prototype on PCB for testing
- Analyze losses, efficiency, thermal performance
- Evaluate dimming performance, flicker, and output ripple
- Iterate on design to refine and improve as needed
- Confirm robustness and lifetime through validation testing
Careful simulation, prototyping, and testing leads to a buck converter LED driver implementation meeting performance goals, cost targets, size constraints, and application requirements.
Summary
- Buck converters can provide an efficient LED driving solution but require adaptations.
- Key design considerations for LED loads include dimming approaches, current regulation, and startup behaviors.
- Performance goals, size constraints, and external controls determine best topology like basic buck, hysteretic, or \SEPIC.
- Following robust design practices ensures an LED driver that meets efficiency, reliability, and functional targets.
- Buck converters, properly engineered for LED loads, enable high performance and flexible solid state lighting solutions.
FAQ
What are the main disadvantages of using a buck converter for an LED driver?
Higher input voltages require a wide duty cycle range. May need lower frequency for light loads. Most buck ICs lack explicit current regulation. Added components or control loops help overcome these limitations.
What causes output voltage overshoot when a buck LED driver starts up?
At startup, the output cap is fully discharged causing a large inrush until regulation is established. Adding a preload, improving control loop speed, and slow soft-start help mitigate overshoot.
How does a buck LED driver provide constant current?
A current sense resistor or amplifier provides feedback to the regulator which adjusts the duty cycle to maintain a constant peak inductor current. This provides controlled average output current.
Why is inductor selection important for buck LED drivers?
The inductor impacts conversion efficiency, transient response time, and ripple currents. A low loss inductor with saturation current headroom prevents tripping protections during surges.
What dimming architectures can be used with buck LED drivers?
Analog PWM, digital PWM, and DC voltage dimming integrate well with buck converters. PWM options avoid color shift at low brightness. Analog dimming requires wider control loops but avoids flicker.















{kind=link}
{kind=link}