A buck converter is a switched-mode DC-DC converter that steps down a higher input voltage to a lower output voltage. By quickly switching a series transistor on and off, voltage is converted efficiently without requiring a linear regulator’s power dissipation.
This article provides a comprehensive overview of buck converter operating principles, design considerations, key parameters, common applications, and integration into larger systems. After reading, you will understand exactly what role buck converters serve in regulated power supplies.
Buck Converter Basics
A buck converter, also called a step-down converter, performs DC-DC conversion from a higher input voltage to a lower output voltage. For example, converting 12V to 5V or 48V to 1V.
Key characteristics of a basic buck converter circuit:
- Converts DC input to a pulsing stepped waveform
- Smooths output with an LC filter
- Wastes less power vs. linear regulation
- Output voltage is a function of duty cycle
- Requires just four main components
- Very efficient (up to 95%)
The buck topology is popular due to its simplicity, efficiency, compact size and flexibility. Let’s examine the internal circuitry and operation.
Buck Converter Circuit Operation
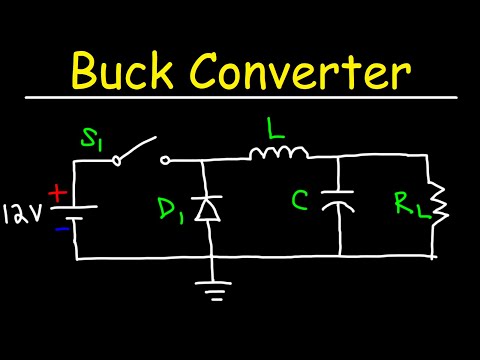
A basic buck converter contains four primary components:
Switch / Transistor (M1) – The transistor acts as a switch, turning on and off rapidly to chop the input voltage. A power MOSFET is commonly used due to its fast switching speed and minimal loss.
Diode (D1) – The diode provides a return current path for the inductor when the transistor switch is off. Schottky diodes are frequently used for their fast recovery times.
Inductor (L1) – While the switch is on, the inductor stores energy in its magnetic field. This energy transfers to the load when the switch turns off.
Capacitor (C1) – The capacitor smooths voltage ripple at the converter output for steady, regulated DC.
Now let’s walk through a complete switching cycle to see how these components interact to convert and regulate voltage.
Buck Converter Switching Cycle Analysis
The buck converter regulates output voltage by rapidly switching the transistor on and off. This drives the connected inductor to store and release energy to the load in a controlled manner. Each cycle involves two distinct circuit states:
Switch ON State
In the ON state, the transistor switch is closed allowing current to flow from the input source to the inductor:
- Input voltage is applied directly across the inductor
- Inductor current ramps up linearly, storing energy in a magnetic field
- Load current is supplied by the capacitor
- Diode is reverse biased blocking current flow
Switch OFF State
In the OFF state, the transistor switch opens interrupting current flow:
- Inductor magnetic field collapses, maintaining current flow
- Stored inductor energy transfers to the load
- Diode becomes forward biased, providing a return path
- Capacitor charges from the inductor/diode
Rapidly alternating between these two states generates a pulsed output voltage. The relative ON vs. OFF durations determine the average output voltage.
Buck Converter Duty Cycle
The output voltage of a buck converter is proportional to the duty cycle D of the switching transistor.
Duty cycle D is defined as:
D = Ton / (Ton + Toff)
Where:
- Ton = Time switch is ON
- Toff = Time switch is OFF
- Ton + Toff = Total switching period
For example, with Ton = 5us and Toff = 15us:
- Total period is 20us
- Duty cycle D is 25% (5us / 20us)
- Output voltage is 25% of input
This demonstrates the buck converter’s step-down effect – by rapidly switching with a low duty cycle, high voltages can be converted to much lower regulated outputs.
Buck Converter Voltage Transfer Function
The relationship between buck converter input voltage (Vin), output voltage (Vout) and duty cycle is:
Vout = D * Vin
Where D is the duty cycle between 0 and 1.
This means the output voltage is equal to the duty cycle multiplied by the input voltage.
If Vin = 12V and D = 0.25, then Vout is 0.25 * 12V = 3V
This shows how the buck converter steps down based on duty cycle. The voltage transfer function is key to designing a buck regulator.
Buck Converter Benefits and Drawbacks
Advantages of buck converters include:
- High efficiency, up to 95% with low loss
- Compact, simple circuitry
- Flexible output adjustment via duty cycle
- No minimum load required
- Isolated designs possible for safety
Limitations can include:
- Output voltage must be less than input voltage
- Switching noise may require filtering
- High current inductors may be bulky
- Heat sinking required at high currents
- Complex control loops for best performance
Overall, buck regulators provide an excellent balance of efficiency, flexibility and simplicity. Now let’s examine some key design considerations.
Buck Converter Design Considerations
Some important buck converter design factors include:
Input Voltage Range – The maximum and minimum input voltage specification ensures the buck converter operates over the intended supply range.
Output Voltage – The required steady-state output voltage. Lower output voltages require lower duty cycles.
Output Current – The maximum load current helps size the inductor, diode, capacitor and transistor ratings.
Switching Frequency – Higher frequencies allow smaller inductors and capacitors but increase switching losses. Optimize for efficiency and size.
Transient Response – The allowable overshoot/droop during sudden load changes guides compensation network design.
Carefully considering these parameters ensures the buck converter is designed properly for the particular application requirements.
Selecting Buck Converter Components
The four main buck converter components must be selected properly for the design specifications:
Transistor – Select based on required current handling, voltage rating, RDS(ON) resistance, and switching speed. Include margin above maximum load current.
Inductor – Size inductance based on desired current ripple. Higher value gives lower ripple but larger size. Rated for peak switch current plus margin.
Diode – Rated for maximum load current. Fast recovery time Schottky diode. Low forward voltage drop improves efficiency.
Capacitor – Output capacitance reduces voltage ripple. Higher capacitance gives lower ripple. ESR impacts transient response.
Dimensioning components for reliability under worst-case operating conditions ensures robust performance over the product lifetime.
Buck Converter Design Example

Let’s walk through an example buck converter design to see the component selection process:
Design Requirements
- 12V nominal input voltage (9 – 15V range)
- 5V regulated output voltage
- 3A maximum load current
- 400kHz switching frequency
Inductor Selection
- Pick 10% peak-to-peak inductor current ripple
- Delta I = 0.1 * Imax = 0.3A ripple
- Calculate minimum inductance
- Lmin = (Vin – Vout) * (Vout / f * DeltaI) = 68uH
- Choose 100uH rated for 3.5A+
Capacitor Selection
- Target < 5% output voltage ripple at 400kHz
- Delta V = 0.05 * Vout = 250mV
- Imax ripple = 3A
- Cmin = Imax / (8 * f * DeltaV) = 30uF
- Select low ESR cap rated for margin above Imax
Transistor Selection
- Peak current = Imax + 1/2 DeltaI = 3.15A
- Select MOSFET with >4A rating and low RDS(ON)
- Include heatsink rated for power dissipation
Diode Selection
- Schottky diode rated for Imax plus margin
- Low forward voltage type
This example provides a simplified overview of the core component selection process for a basic buck converter design.
Buck Converter Control Methods
To achieve stable, responsive output voltage regulation, buck converters employ closed-loop control:
Voltage Mode
- Measures output voltage with feedback divider
- Controls duty cycle to maintain voltage
- Susceptible to instability
Current Mode
- Adds inductor current sensing
- Prevents subharmonic oscillation
- Improves transient response
Hysteretic Control
- Switches based on output ripple bandwidth
- No compensation loop required
- Can cause variable frequency
PID
- Actively tunes proportional, integral and derivative gains
- Dynamic compensation for wide loads
- More complex to implement
Advanced control techniques like digital PID allow buck regulators to adaptably maintain tight voltage regulation.
Buck Converter Parameters and Characteristics
Key buck converter parameters help evaluate performance:
Efficiency – Ratio of output power to input power, with ideal up to 95%.
Ripple – Remaining AC voltage and inductor current fluctuations.
Load Regulation – Output voltage change based on load current variation.
Line Regulation – Output change based on input voltage change.
Transient Response – Overshoot and settling time for step load changes.
Test results for these parameters validate the regulator design and PCB layout optimize overall functionality.
Buck Converter Applications
Buck converters are ubiquitously used to step-down and regulate voltages in a wide range of applications:
- DC power supplies
- Battery chargers
- LED drivers
- Point-of-load regulators on PCBs
- DC-DC conversion in electric vehicles
- High current load regulation
- Pre-regulators for LDOs
- Envelope tracking RF amplifiers
Any application with higher DC input voltages and lower DC load voltages can benefit from the simplicity, efficiency and compact size of properly designed buck converter circuits.
Integrating Buck Converters Into Systems
Buck regulators are commonly integrated within larger electronic systems:
Input Filtering – An input pi filter reduces EMI and voltage ripple from the upstream power source.
Protection Devices – Fuses, thermistors and TransZorbs clamp overcurrent and transients on input and output.
Feedback Compensation – An op amp may generate the PWM signal sent to the transistor based on voltage feedback.
Paralleling Converters – Buck regulators can be paralleled using diodes for higher output currents.
Sequencing – Where multiple voltage rails must be powered on/off in order, power sequencing ICs control regulator timing.
Properly incorporating buck converters into the greater design ensures robust performance meeting all system requirements.
Summary of Buck Converter Function and Applications
The key points regarding buck converter function and applications covered here include:
- Buck converters step down a higher input DC voltage to a lower regulated output voltage efficiently by rapidly switching the input power on and off.
- Regulation is achieved by adjusting the switching duty cycle to maintain the intended output voltage based on feedback.
- Only four primary components are required – a transistor, diode, inductor and capacitor – making buck regulators simple and cost effective.
- Careful component selection and control loop design ensure proper voltage conversion and regulation for the intended application over expected operating conditions.
- Buck converters are ubiquitous DC-DC converter circuits used across countless applications due to their simplicity, flexibility and high efficiency.
Hopefully this overview clearly explains what role buck converters serve in regulated power supplies and inspires further learning about their design and integration.
Frequently Asked Questions
What are the main advantages of a buck converter vs. an LDO?
Key advantages of buck converters compared to low dropout (LDO) linear regulators include:
- Far higher efficiency – up to 95% vs. <50% for LDOs
- Can output high load currents – tens of amps vs. one amp or less
- Wastes less power as heat enabling smaller size
- Lower cost at higher currents
- Higher input to output voltage differential – step-down vs. just small dropout
So for most higher power applications, buck converters are superior to LDOs.
What are some key disadvantages or limitations of buck converters?
Some potential downsides of buck converters include:
- Output voltage must be lower than input voltage
- Switching can produce noise needing filtering
- Inductor core losses reduce efficiency at high frequencies
- Require proper control loop design for stability
- Higher BOM cost than linear regulators
So buck converters may not be ideal for very low noise or ultralow power circuits.
What determines the maximum switching frequency for a buck converter?
Key factors limiting buck converter switching frequency include:
- MOSFET switching losses start exceeding conduction losses
- Gate charges and transition times of transistors
- Core losses in inductor material due to hysteresis
- Capacitor equivalent series resistance and inductance
- Feedback circuit bandwidth limitations
- EM radiation becoming problematic
Practical switching frequencies for buck regulators generally range from 100 kHz to 5 MHz at most. Minimizing loss mechanisms allows pushing to higher frequencies for smaller size.